{kind=link}
Physical AI at the Edge: The Intel Robotics AI Suite on Core Ultra Series 3
Physical AI at the edge is moving artificial intelligence from screens and cloud services into machines that can sense, reason, and act in the real world. For teams building next-generation robots, intelligent machines, AMRs, service robots, and embodied AI systems, this shift creates a new design question:
How can a robot controller support perception, AI inference, sensor coordination, motion-control communication, and responsive system behavior locally on compact edge hardware?
At Automate, NODKA is highlighting its Core Ultra Series 3 robot controller platform with a reference technology stack built around Intel Robotics AI Suite. The focus is the hardware foundation and the technologies that can run on it: ROS 2 robotics middleware, OpenVINO-optimized inference, depth sensing, and heterogeneous CPU, integrated GPU, and NPU computing on an industrial x86 controller.
The result is a practical technology direction for engineers exploring Physical AI at the edge, embodied AI designs, edge robot controllers, and AI models running locally on Core Ultra platforms.
Why Edge Robotics Needs More Than an AI Accelerator
A robot controller is not only an inference box. It needs to connect AI models to machines that understand their environment, respond to sensors, and operate with predictable behavior.
A controller may need to process camera or depth data, detect people or objects, coordinate system state, communicate with motion devices, and provide operator feedback. These workloads need to run close to the machine, where latency, reliability, power consumption, and observability all matter.
That is why the platform architecture matters.
For embodied systems, the challenge is not only choosing a model. The challenge is bringing together sensors, robotics middleware, AI runtime, compute placement, deterministic control, and robotics-ready I/O on one compact edge platform.
Core Ultra Series 3: CPU + iGPU + NPU for Edge AI Robotics
Intel Core Ultra Series 3 brings multiple compute engines into one processor platform. For robotics and embodied AI workloads, this enables a more balanced architecture where different parts of the system can run on the compute resource best suited to the task.
In a robot-controller platform:
- The CPU handles deterministic logic, ROS 2 coordination, system state, I/O handling, and fallback behavior.
- The integrated GPU can support continuous vision and AI workloads that benefit from parallel compute.
- The NPU can support efficient local inference for selected small or always-on AI tasks.
- The software stack determines how models and workloads are placed across the platform.
This is the key idea behind the reference system. Edge robotics is not only about raw AI performance. It is about the full loop: sensor input, perception, inference, state logic, response, communication, and control.
Intel Robotics AI Suite: The Software Foundation
Intel Robotics AI Suite provides a development foundation for robotics and AI applications on Intel Core and Core Ultra processors.
The suite brings together robotics software, ROS 2 workflows, OpenVINO-optimized AI pipelines, hardware guidance, developer resources, and benchmarking tools. For teams evaluating Core Ultra platforms, this matters because robotics AI development requires more than an inference engine. It requires a coordinated stack.
For developers visiting NODKA at Automate, the key message is that the controller platform can support more than isolated model inference. It can provide the hardware foundation for a reference robotics AI stack built with Intel’s latest edge AI technologies.
ROS 2 and OpenVINO: Connecting Robotics and AI
ROS 2 provides the robotics middleware layer. It helps connect camera nodes, AI inference nodes, trigger logic, orchestration, telemetry, visualization, and user interaction through a modular robotics graph.
Intel OpenVINO provides the AI optimization and deployment layer. It helps developers convert, optimize, and deploy AI models across Intel compute targets, including CPU, integrated GPU, and NPU where supported.
Together, ROS 2 and OpenVINO help bridge the gap between robotics software and AI inference. ROS 2 coordinates the system. OpenVINO helps place and optimize AI workloads. The controller hardware provides the local computer and I/O foundation.
Vision and Robotics I/O for Embodied Systems
For edge robotics, sensing is the starting point. A robot or intelligent machine needs to understand not just what is in the scene, but where objects and people are located in physical space.
The Automate reference uses depth + RGB sensing as one perception input. In the demo context, an OpenVINO-optimized vision model can support person detection and distance-aware perception, with vision inference running locally on the controller platform.
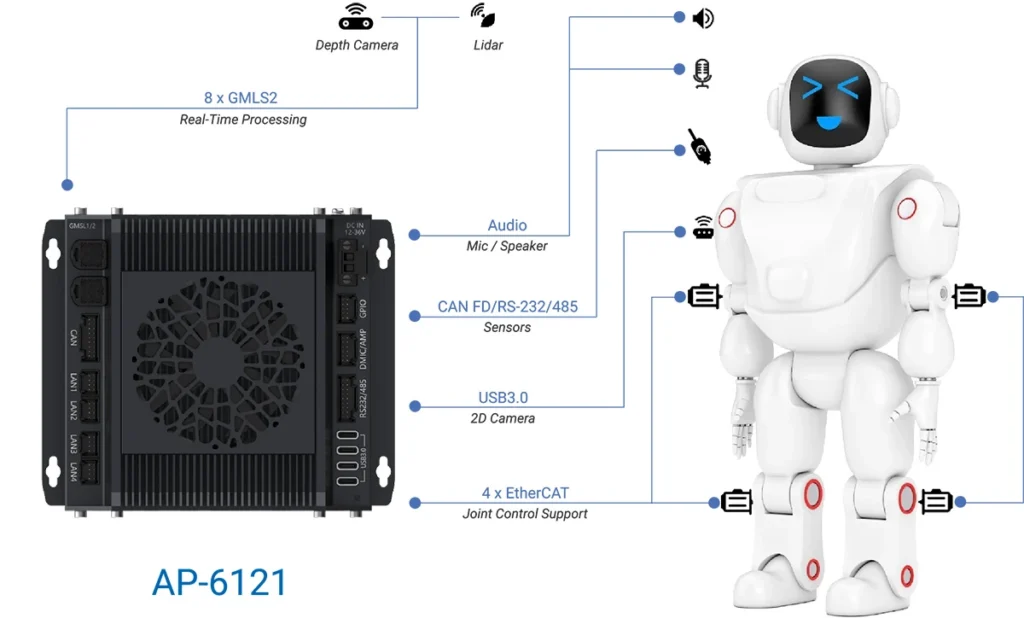
The controller also supports camera and robotics expansion for more advanced designs. This includes GMSL2 camera connectivity for multi-camera perception, as well as CAN FD and EtherCAT-capable Ethernet for robotics and motion-control communication.
These interfaces matter because embodied AI is not only about running a model. It is about connecting AI-assisted perception to the real machine: cameras, sensors, actuators, motors, audio, displays, and industrial networks.
Demo Interface: Seeing the AI Workload in Action
For engineers evaluating a new robot-controller platform, it helps to see more than the final AI output.
The Automate demo includes a robot-eye interface that shows the reference stack in action. Visitors can see a live perception view, detection overlays with distance information, and a real-time engine-activity strip that helps show how the platform is being used while the demo runs.
This makes the Core Ultra Series 3 architecture easier to evaluate. Instead of only talking about CPU, integrated GPU, and NPU workload distribution, the demo gives visitors a practical view of AI inference, perception, and platform activity running together on the same industrial controller.
Why This Matters for Physical AI Developers
For teams building embodied systems, the important question is not only “which model should we use?” The bigger question is “what platform can support the AI workloads, sensors, and control interfaces required by the application?”
A Core Ultra Series 3 edge controller with Intel Robotics AI Suite and robotics-ready I/O can help teams explore:
- Local AI inference for robotics and intelligent machines
- Depth and RGB perception workflows
- GMSL2 multi-camera expansion for richer sensing
- CAN FD and EtherCAT-capable communication for motion-control integration
- ROS 2 and OpenVINO workflows on an industrial x86 controller
For some applications, specialized robotics AI modules will still be the right choice. For others, an industrial x86 controller with CPU, integrated GPU, NPU, robotics-ready I/O, ROS 2, OpenVINO, and Intel Robotics AI Suite may provide a flexible platform to explore what comes next.
See the Physical AI Technology Stack at Automate
This Physical AI technology reference is part of NODKA’s broader Automate Edge AI showcase, alongside:
- Optimizing Local LLMs for Real-Time Machine Vision on Edge AI Platforms
- Industrial IPC Platforms for Ignition SCADA Architectures
Together, these demos highlight a common direction: industrial IPCs are becoming Edge AI platforms for machine vision, SCADA, robotics, and embodied intelligence.
At the show, NODKA will highlight how its Core Ultra Series 3 AP-6121 robot controller platform can support a reference technology stack built around Intel Robotics AI Suite, ROS 2, and OpenVINO.
For engineers exploring Physical AI, AI models on Core Ultra Series 3, embodied AI robot-controller designs, depth-based perception, ROS 2 robotics workflows, and OpenVINO optimization, the demo provides a practical look at how the stack fits together on NODKA industrial controller hardware.